|
|
inviato il 13 Agosto 2025 ore 15:20
non nel paragone fra due foto scattate da due macchine diverse 
Il parametro stabile nel confronto delle foto sono gli EV (nell'ipotesi di isovarianza) |
|
|
inviato il 13 Agosto 2025 ore 15:28
Non intendevo di paragonare le terne... intendevo quando scatti le foto che poi paragoni
“ Scatto, sviluppo i due raw in maniera analoga e vedo quel che ha meno rumore. „
Cioè, lasci fare alle macchine la valutazione della terna e poi analizzi i risultati... ho capito bene? |
|
|
inviato il 13 Agosto 2025 ore 15:43
Si'.
Premetto (avrei dovuto farlo prima  ): non e' un argomento che mastico molto e mi auguro di non scrivere castronerie. ): non e' un argomento che mastico molto e mi auguro di non scrivere castronerie.
Cerco di andare di logica.
Se quel che voglio sapere e' la resa di due macchine a parita' di scena (focalizzandomi sul rumore), sotto l'ipotesi che entrambe le macchine leggano sul sensore gli stessi EV (e che quindi tutto quel che c'e' prima del sensore sia uguale in termini di resa ottica - lente etc.), secondo la mia logica, se la terna esposimetrica per le macchine e' indicata come (per esempio)
M1 F/2.8, 1/200s, 100 iso
M2 F/2.8, 1/200s, 200 iso
per me non ha importanza.
Significa che la M1 e' impostata per riportare il valore 100 iso e la M2 e' impostata per riportare il valore 200 iso al pari di EV letti.
Cosa c'e' dietro questa differenza (marketing etc.) non e' importante al fine di raggiungere l'obiettivo del test: quale macchina rende meglio a parita' di EV
EDIT: e sotto l'ipotesi che l'istogramma delle due immagini di M1 ed M2 sia identico, il che significa che le due macchine non sovra/sotto espongano
|
|
|
inviato il 13 Agosto 2025 ore 16:26
@Fr4engod “ Premetto (avrei dovuto farlo prima ): non e' un argomento che mastico molto e mi auguro di non scrivere castronerie. Cerco di andare di logica. „
Quale logica? Prima ammetti di essere poco edotto, poi applichi la TUA logica? Capisci la contraddizione in termini? |
|
|
inviato il 13 Agosto 2025 ore 16:27
la logica e' cosa diversa dagli elementi che tratta.
non e' una contraddizione in termini.
|
|
|
inviato il 13 Agosto 2025 ore 16:47
az l'aria comincia a friggere  |
|
|
inviato il 13 Agosto 2025 ore 16:57
Io ho sempre pensato che un test di laboratorio vada condotto escludendo quante più variabili possibili. Quindi presumo senza elementi interferenti, o se non possibile, a parità di elementi interferenti, quindi penso che la diversa T sia per dxo esclusa. Come è stato detto è difficile che venga fatto sul sensore nudo, ma a valle di tutto il processo e quindi su un file finale prodotto, quindi anche il processore diventa una variabile già considerata
Se come dice frengod fosse lasciata decidere alla macchina la terna esposimetrica, si andrebbe ad introdurre la variabile dell'esposimetro, che per ogni macchina ragiona in modo diverso.
Il grafico di dxo, da come l'ho inteso io, indica la distanza da un nominale iso da quello che loro si sarebbero aspettati di trovare.
Quindi se per 2 macchine diverse, con iso reali e misurati simili, escludendo T, escludendo il processore e avendo la stessa terna, la differente esposizione che si ritrova alla fine da dove può nascere? È di questo che non riesco a venirne a capo...e probabilmente da qualche mi perdo. |
|
|
inviato il 13 Agosto 2025 ore 17:08
“ quindi anche il processore diventa una variabile già considerata „
Ma a te serve sapere come va senza considerare il processore o ti serve sapere coma va usandola?
Ma che voli di fantasia vi fate? |
|
|
inviato il 13 Agosto 2025 ore 17:12
“ Le due terne che metti come esempi non sono equivalenti, quindi non sono lo stesso EV.
„
Non ti è mai capitato che due macchine la stessa scena le leggano con terne diverse? No, eh?
A me sì, spesso (certo, se uno ha solo una macchina o se ne usa solo una alla volta questo non può saperlo) |
|
|
inviato il 13 Agosto 2025 ore 17:20
@Samuel
Se mi immedesimo in quelli di dxo farei cosi':
decido un'apertura ed un tempo.
ho gli EV della scena ripresa: calcolo gli iso.
Chiamiamo questi ISO teorici (ISOTEVX)
prendo la macchina M1 (chiaramente tenendo conto dell'obiettivo) la metto a quell'apertura ed a quel tempo.
Per gli EV impostati lei mi risponde con un valore ISOM1EVX.
la differenza fra ISOTEVX ed ISOM1EVX, come detto prima puo' avere un tot di giustificazioni, anche il marketing.
Un po' come il tachimetro.
Se la memoria non mi inganna, almeno 25 anni fa era cosi', il tachimetro, per legge deve avere tolleranza -0%/+5% fra il rapporto velocita' indicata e velocita' reale. Deve indicare sempre una velocita' >= a quella reale. Per far vedere che vai piu' forte
Il grafico di dxo, nei pallini, indica l'iso teorico e l'iso riportato dalla macchina.
Nel mio modo di vedere, la cosa non mi disturba affatto.
In maggior misura poiche' il valore iso nell'era digitale ha davvero poca attinenza con il valore iso della pellicola.
L'avessero chiamato vittorio, sarebbe stato lo stesso.
Fai come per l'energia potenziale: e' definita a meno di una costante arbitraria 
Ogni macchina c'ha la sua
|
|
|
inviato il 13 Agosto 2025 ore 17:20
Alcune precisazioni sul primo post di Samuel
“ Quindi all'aumentare del valore iso c'è un'amplificazione del segnale, ma anche del rumore „
Non è l'amplificazione del segnale che aumenta il rumore (lo shot noise), ma la poca luce. Che compensiamo aumentando gli ISO.
Anzi, in certe condizioni gli ISO più alti possono comportare meno rumore nelle ombre.
“ le foto panasonic sono sempre sottoesposte di 1/3-2/3 di stop rispetto a canon „
Attenzione: non sappiamo chi ha ragione... La "giusta esposizione" è quella che ti fa portare a casa il risultato corretto.
E' strettamente legata anche al sistema esposimetrico della fotocamera che può essere più "conservativo", più "prudente" sulle alte luci. Non vale nel tuo caso dove avevi due terne identiche.
“ quest'ultima che dovrebbe montare lo stesso sensore. „
Stesso sensore non significa che tutta l'elettronica, il processore, ecc siano gli stessi.
“ Cosa mi sto perdendo in questo caos? „
Alcune cose le sappiamo con la "sfera di cristallo". Nel senso che l'ingegnerizzazione delle fotocamere è ovviamente un segreto industriale; nessun brand pubblica tutto...
Ti devi concentrare sul risultato: se "l'esposizione Panasonic" in quel caso specifico era risultata più efficace di "quella Canon". Tu sai che basta una minima correzione (in Canon) per avere il risultato identico in termini di esposizione. Punto. Concentrati sul risultato.
E' vero che DxO Mark non ha testato il sensore della R6 II ma dovrebbe in effetti essere lo stesso della R8 (non lo so).
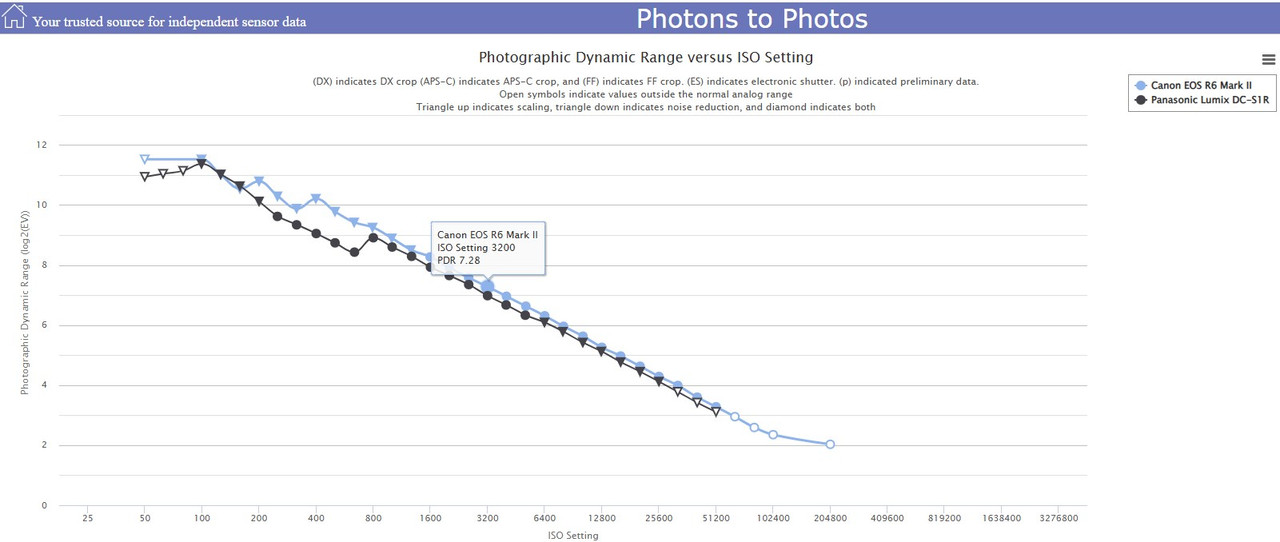
Su PhotonsToPhotos, nel grafico della GD, mettono anche loro il valore ISO misurato e leggendo sia Panasonic che Canon per entrambe scrivono 3200...
Quindi...? Andiamo a cercare la differenza altrove? E' più attendibile DxO o PTP? Non lo sappiamo...
Se fossi in te, mi concentrerei sull'impegno a fare belle foto.
Queste sono "pippe"... 
|
|
|
inviato il 13 Agosto 2025 ore 17:25
“ Cosí come scrivi non ha senso. „ Capisco la perplessita', spero di esser chiaro e di non commettere errori.
Ho un esposimetro di quelli portatili. Lo calibro (non ho idea di come fare).
Ho una scena.
L'esposimetro mi dara' una terna e quindi l'EV della scena.
Una macchina per quell'EV mio di riferimento, anche se legge quell'EV di riferimento mi da' una terna diversa da quell'EV di riferimento. D'accordo che a questa terna diversa corrisponda un'altro EV, quello della macchina.
Scusami se ho generato confusione.
Il ragionamento e' a parita' di EV della scena. |
|
|
inviato il 13 Agosto 2025 ore 17:29
Il problema di fondo è che non vi è un solo standard per la sensiblità iso.
Ad esempio Canon utilizza lo standard REI, che non fa riferimento a una formula, ma è molto più elaborato, e consente maggiore flessibilità per definire le sensibilità iso.
Oltre a questo, vi è di mezzo tutta la catena di elaborazione software, e qui sorgono altri problemi. Assumiamo di usare lightroom, per semplicità.
1) Lightroom applica una correzione automatica dell'esposizione, dipendente dal modello di fotocamera, senza che si abbia controllo sulla stessa. In altri termini, anche se il cursore dell'esposizione è a zero, il programma sottoespone o sovraespone, possibilmente in modo diverso da una macchina all'altra.
photographylife.com/adobes-silent-exposure-compensation
Come si vede dal link, il divario di questa correzione dell'esposizione automatica può persino superare lo stop, tra una macchina e l'altra.
2) Anche se si utilizzano profili colore con lo stesso nome, non è detto che si comportino in modo equivalente, tra modelli diversi di macchine
3) Anche i profili colore "come fotocamera" sono un reverse engineering di quelli del produttore, per cui sono solo un'approssimazione
4) Ho sperimentato direttamente che, anche se il sensore è andato in saturazione, e nel raw certi pixel non hanno registrato informazione utile, lightroom ha delle sorte di euristiche per cercare di ricostruire informazioni su certi canali, ad esempio usando le informazioni sui pixel limitrofi. Ovviamente sta inventando dei dati, per cui la resa in termini di colori può essere non eccelsa. |
|
|
inviato il 13 Agosto 2025 ore 17:31
No, a me serve capire perché se dxo propone un valore che vuole essere uno standard, quello standard poi sul campo dovrebbe risultare diverso, quindi immagino dxo nella realizzazione del suo standard abbia cercato di escludere il processore dai suoi calcoli. Quello che chiedo io è, perché se ho 2 fotocamere diverse impostate uguali e a 3200 iso mi trovo un'immagine sovraesposta di più di mezzo stop rispetto all'altra? Questo l'ho capito, una sta lavorando in realtà a 2500, l'altra a 2300 reali...però anche li, è quella che sta lavorando a 2300 iso reali che è sovraesposta, quindi nemmeno questo torna. Se dovessi portarle entrambe a lavorare a iso 2500 reali, avrei una foto ulteriormente sovraesposta. |
|
|
inviato il 13 Agosto 2025 ore 17:33
Samuel leggi il mio post e anche quello di HBD |
Che cosa ne pensi di questo argomento?
Vuoi dire la tua? Per partecipare alla discussione iscriviti a JuzaPhoto, è semplice e gratuito!
Non solo: iscrivendoti potrai creare una tua pagina personale, pubblicare foto, ricevere commenti e sfruttare tutte le funzionalità di JuzaPhoto.
Con oltre 260000 iscritti, c'è spazio per tutti, dal principiante al professionista. |

Metti la tua pubblicità su JuzaPhoto (info) |

 JuzaPhoto contiene link affiliati Amazon ed Ebay e riceve una commissione in caso di acquisto attraverso link affiliati.
JuzaPhoto contiene link affiliati Amazon ed Ebay e riceve una commissione in caso di acquisto attraverso link affiliati.